RUDI
Cossovich
About

Projects
Publications


My full name is Rodolfo Cossovich, but I prefer to go by Rudi, with a Latin
'i' that marks my origin. I was
born in Argentina and spent a significant part of my adult life in China and
Taiwan. An image on this page displays a
middle-aged person with little hair, a mustache, and a goatee, smiling and
holding a robot.
I have solid technical expertise, ranging from consumer electronic product
design to robotic systems. Nevertheless, I am
deeply engaged in arts and social impact.
I am an Assistant Arts Professor of Interactive Media Arts at NYU Shanghai,
while I pursue a Ph.D. remotely at Carleton
University's Creative Interaction Lab. My current research focus is
Accessibility in Human-Computer Interaction.

Pack for Xbox Adaptive Controller (XAC), to allow bluetooth wheelchair controllers to play with XBOX. This project was developed for the Children's Hospital Eastern Ontario (CHEO), by volunteers at TETRA SOCIETY. I was in charge of the third iteration of hardware and software, collaborating with occupational therapists, people with disabilities, and XBOX experts.
Check out the Github Repo
Pack for Xbox Adaptive Controller (XAC), to allow bluetooth wheelchair controllers to play with XBOX. This project was developed for the Children's Hospital Eastern Ontario (CHEO), by volunteers at TETRA SOCIETY. I was in charge of the third iteration of hardware and software, collaborating with occupational therapists, people with disabilities, and XBOX experts.
Check out the Github Repo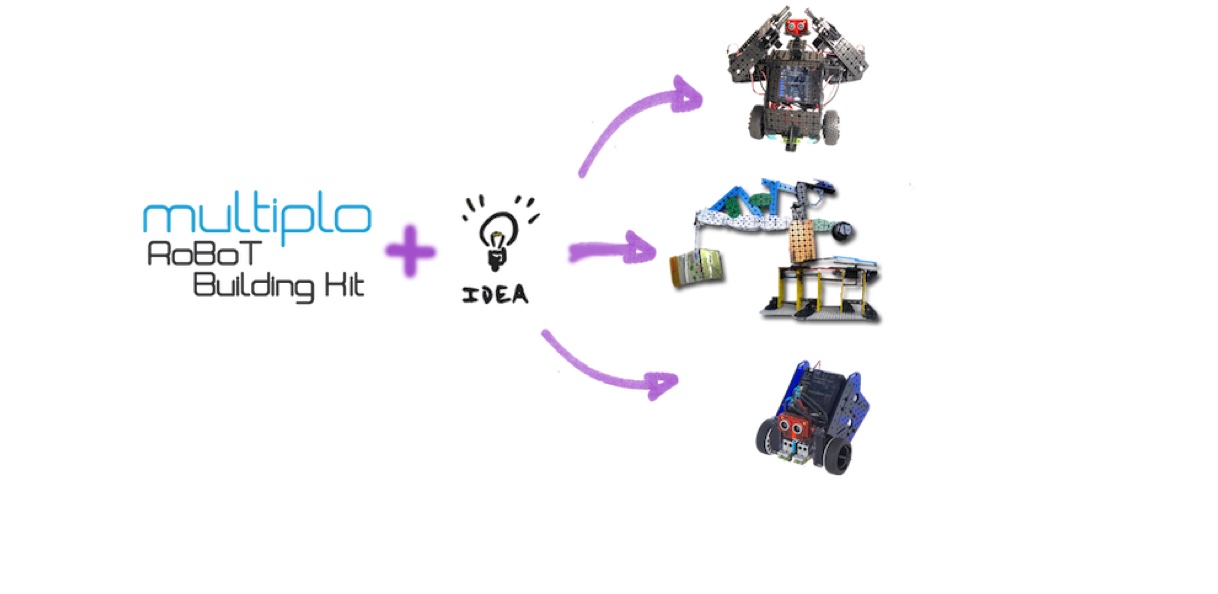
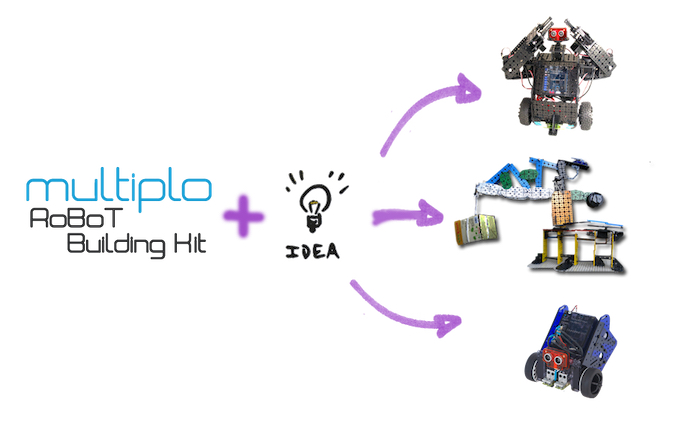
We develop this system in order to prototype robots. But we ended up
inventing a platform to build things. We have been
using it at public schools and it has proved to be suitable as
teaching material. They are currently using it for STEM
Education (Science, Technology, Engineering and Mathematics) for
young students.
Making a robot was a challenge some time ago, and only a few could
have access to that. We want to reach a critical mass
that allows us to break boundaries. We have found Arduino's
philosophy inspiring. We think that it's time that their
concept spreads to other areas.
We want our fully Open Source Robot Kit to get into the hands of
educators, artists and any kind of creative people. It
is our dream to get robotics close to people. We think it’s time for
a change. Robotics for Everybody!

Plobot is a fun, educational robot that teaches young learners
coding concepts without all the messy syntax – and
without any need for computer screens. They will learn about
algorithms, loops, conditionals, and more, all while having a
blast with their favorite new toy!
Command cards are at the core of the Plobot experience, making every
interaction tactile and hands-on. Each Command Card
represents a block of code. Tap or swipe them on Plobot's head to
string them together and create a "program" the robot
follows - with the "play" card as an execute function. The base set
lays the building blocks for controlling Plobot,
while our expansion sets allow the robot to grow with your child's
abilities, creating countless possible combinations!

We had the combined experience of teaching with Arduino for some 15
years among the whole team, but all of us felt
frustrated in a way or other by the way hardware was not really
connected with the learning journey a beginner would
face.
Some time ago we started teaching summer camps at Koding Kreators,
and I had now some 8 years since I jumped into the
Open Source Robot Plaform Multiplo. The development of the Duinobot
was something already in the version 1.1 or 1.2 by
the time I started manufacturing them, nevertheless I got a real
grasp of what it means to bring technology to a
classroom with Plobot.

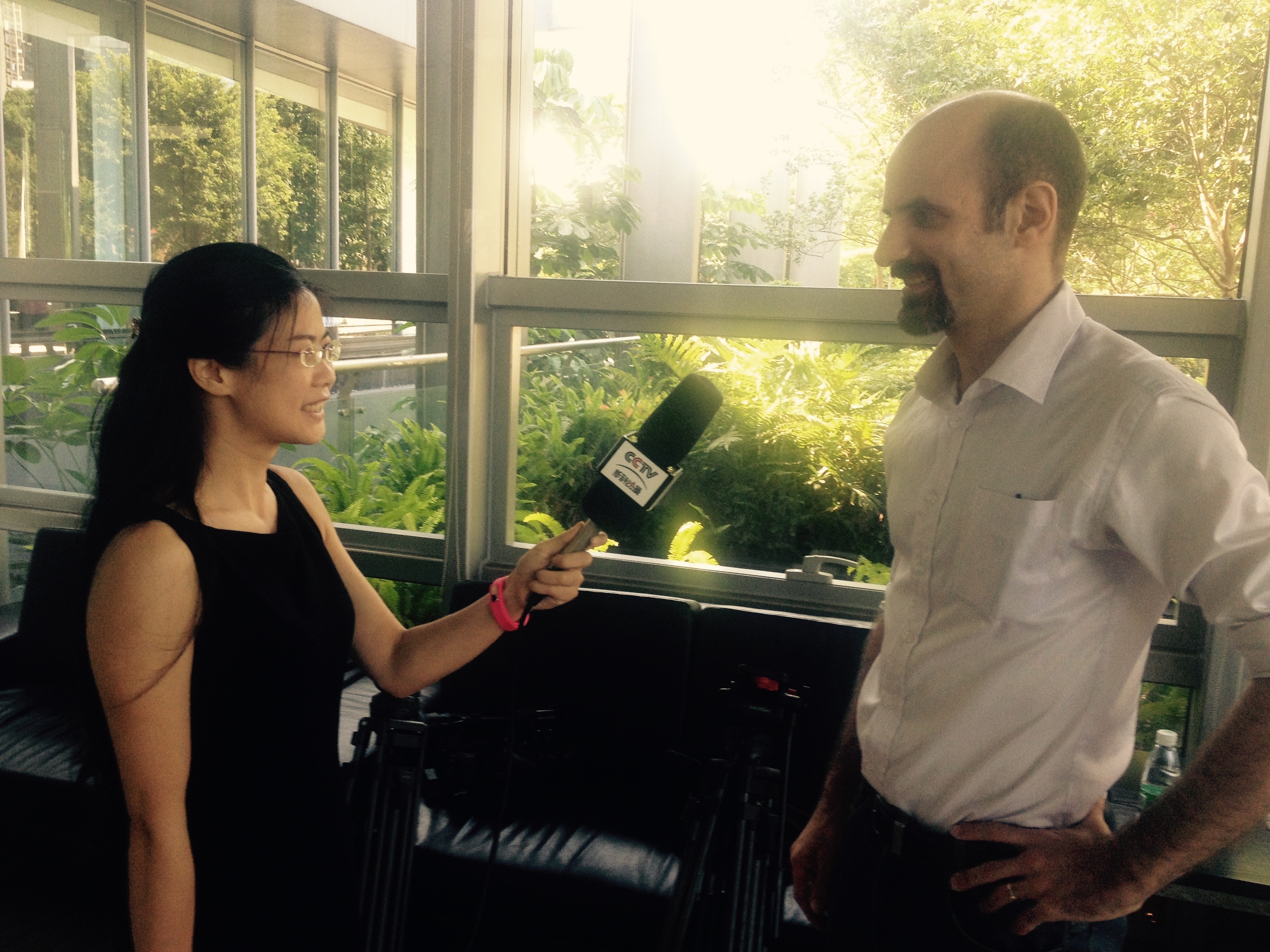
Back in 2014, Shanghai TV featured in their creative spot the platform Multiplo. I also recorded a series of tutorials to explain how to use it to prototype robotics quickly. Beware: it's mostly in Chinese, and I am so nervous that I can barely make sense of myself.
Link to Youtube Videos
Our project aims to design and build our own scalable swarm robot
platform by optimizing a set of criteria, such as
cost, programmability, size, and simplicity. Designing a mobile
platform that can be scalable to present swarm behaviour
faces many challenges that scientists are trying to solve worldwide.
By prototyping a different design born from the analysis of other
robots, we will evaluate our solution on how it is
more effective. This project will benefit future research on swarm
robotics since it aims to provide a feature of swarm
robot systems with a more straightforward design. Furthermore, we
expect the project to be integrated with other fields,
such as rescue robots, and medical robots, to provide the advantages
of a swarm robot system.
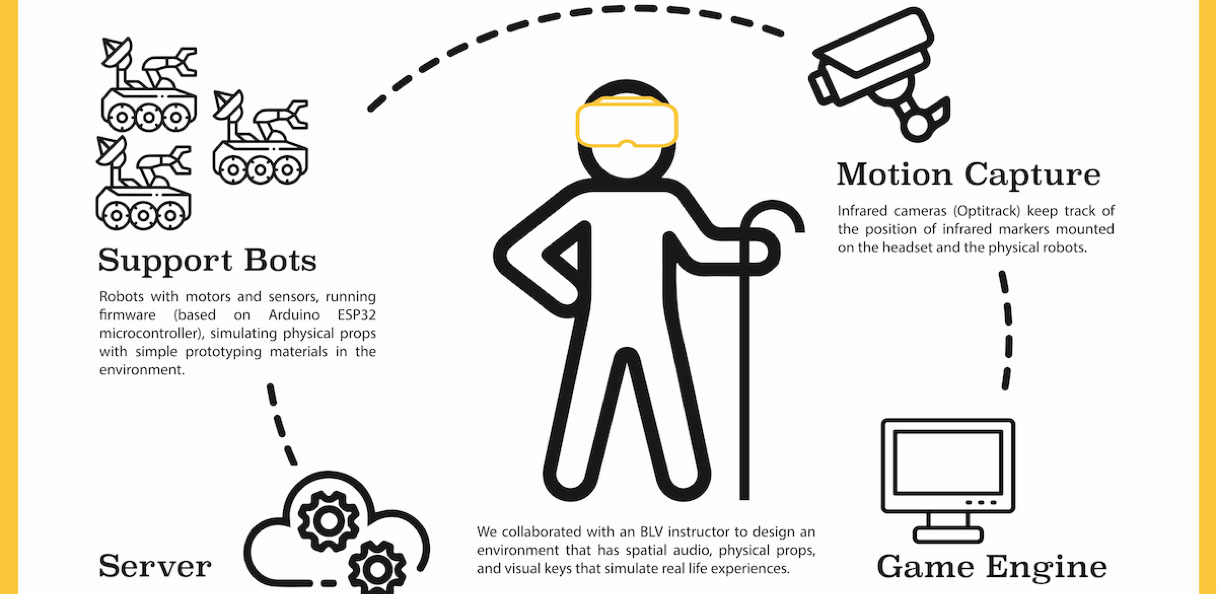
This research explores the potential of combining virtual reality
(VR) and robotic technologies to create a safe and
interactive learning environment for people who are blind and low
vision (BLV). The paper presents a case study called
roboVR, which integrates motion capture, obstacle avoidance robots,
and VR to simulate real-world scenarios for blind and low vision
users.
The goal is to provide a realistic training environment
for individuals to navigate unfamiliar spaces, such as streets or
metro stations. The research team utilized OptiTrack cameras and
ESP32 robots to capture real-world position data and stream it to
Unity for creating the VR environment.
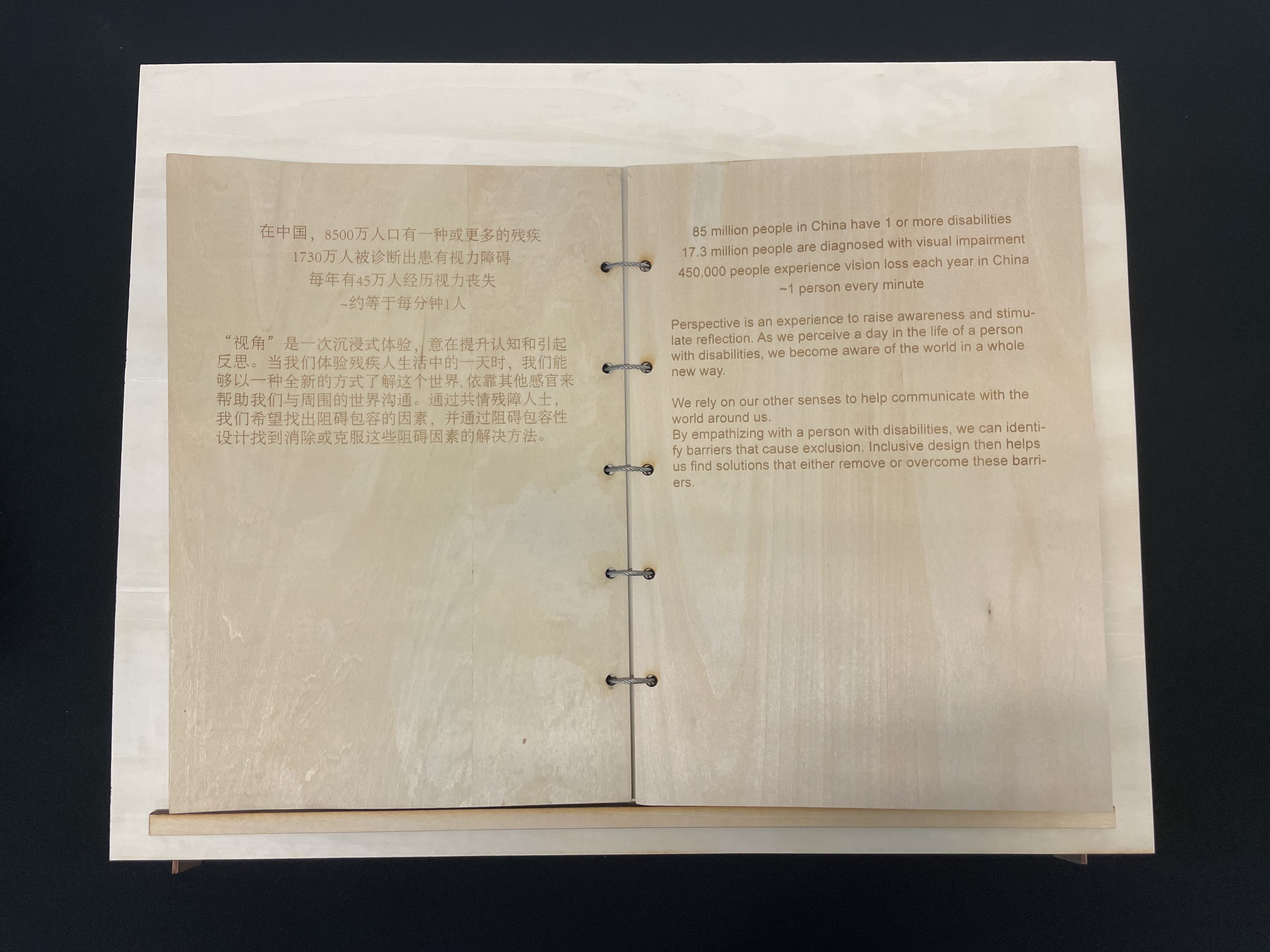
Perspective is an experience to raise awareness and stimulate
reflection. As we perceive a day in the life of a person with
disabilities, we become aware of the world in a whole new way. We
rely on our other senses to help communicate with the world around
us.
The VR experience is a scenario from the life of Haibin, from his
place of work, a blind massage shop. 360 video is taken at 2
locations: 1) greeting a customer at the reception desk and 2)
providing a massage to a customer. Both are taken from Haibin’s
point of view.

This project investigates the experiences of
people with motor impairments with computers and
highlight the importance of providing a wider variety of
customizable assistive technology offerings. We co-designed
solutions with people benefitting from solutions to make their
computer interfaces more accessible.
The goal of this project was to contribute to the nascent literature
that investigates ways to improve the ways that
people with mobility impairments can become more productive with
their computers. We also researched how the design of
the co-design activities can elicit meaningful dialogue and empathy
and how incorporating the Jacdac platform can
support brainstorming between researchers, designers, and people
with motor impairments. The findings of this project
were published at the 25th Conference on Computers and Accessibility
(ASSETS '23).

Koding Kreators was a startup focused on STEAM education. I developed content for an immersive STEAM learning experience for children ages 5 to 15. Our camp programs focused on art and technology scaled up to a team of 15 teachers with hundreds of students per summer. We ran activities
Watch promo videoCossovich, R., Chang, M., Fu, Z. & Hodges, S.(expected 2024). People With Motor Impairments Using Computers and Smartphones: Understanding Challenges Faced and Solutions Adopted. Submitted to Special Issue on IEEE Pervasive Computing (Link ]
Cossovich, R., Hodges, S., Kang, J. & Girouard, A.(2023). Co-designing new keyboard and mouse solutions with people living with motor impairments. In Proceedings of the 25th International ACM SIGACCESS Conference on Computers and Accessibility (pp. 1-7). (ASSETS ‘23), New York, USA. https://dl.acm.org/doi/10.1145/3597638.3614549
Cossovich, R., *Oury, A., *Wang, H. & Cochrane, K. (2023). roboVR: A Mixed Reality Simulation for Blind and Low Vision Students. Poster presented at the 39th Graphic Interfaces (GI 23), Victoria, Canada. [ Link ]
*Nomoto, M., *Lustig, A., Cossovich, R., & Hargis, J. (2022). Qilin: a Robot-Assisted Chinese Language Learning Bilingual Chatbot. In Proceedings of the 4th International Conference on Modern Educational Technology (ICMET 2022), Macau, China. doi.org/10.1145/3543407.3543410
Roushdy, A., Cossovich, R., *Li, Y., & Hargis, J. (2022). Realizing the importance of course design through rapid and frequent modifications in instructional modality. The Online Journal of New Horizons in Education-July, 13(3). https://www.tojsat.net/journals/tojned/articles/v13i03/v13i03-07.pdf
Cossovich, R., & Ermacora, G. (2021). Interactive Technology Workshop as an Activity for Social-emotional Competence in a Post-pandemic Scenario. Edulearn21 Proceedings, presented at the 13th Annual International Conference on Educational Technology in Palma de Mallorca, Spain. doi.org/10.21125/edulearn.2020.0581
Lavigne, E., Cossovich, R., & Hargis, J. (2021). Using Design Thinking and Robots to Assess and Measure a Distance Learning After-School Program. Global and Local Distance Education- GLOKALde, October 2021, ISSN 2148-7278, Volume: 7 Number: 2, Article 2. http://www.glokalde.com/pdf/issues/20/Article2.pdf
Cossovich, R., Hargis, J., & Chun, H. (2020). Working with electrons: Integrating “kits” for hands-on online learning in homes. The Online Journal of New Horizons in Education. www.tojned.net/journals/tojned/articles/v10i04/v10i04-05.pdf
Cossovich, R. (2020). A Project-Based Learning Approach to Electromagnetism. Edulearn20 Proceedings, presented at the 12th Annual International Conference on Educational Technology in Madrid, Spain. doi.org/10.21125/edulearn.2020.0581
Cossovich, R., *Virgint, S., *Garg, Y., *Dhakar, D. & Lu, L. (2020). Robotario: experiments in robotic agency. Presented at the 4th International Conference of Robotics and Automation in Chengdu, China. http://dx.doi.org/10.1145/3402597.3402598
Cossovich, R. (2019). Enlightening Intelligence: Behaviors from Synthetic Psychology.Poster presented at the 25th International Symposium of Electronic Arts (ISEA 2019) in Gwangju, Korea. [ Link ]
*Student co-authors supported this research
You can reach out via email, linkedin, or wechat over:
Puede contactarme via email:
也可以用中文发给我邮件或发微信: